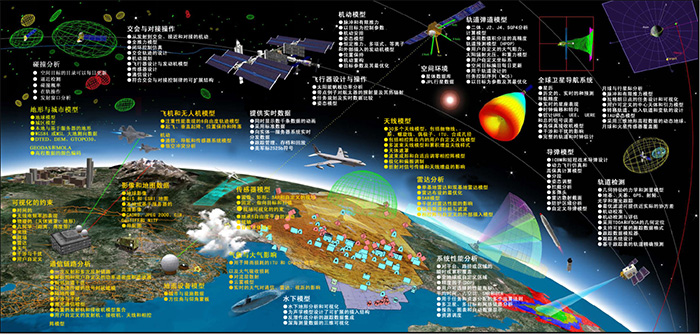
圖1 STK主要模型及功能
最初,STK軟件是作(zuò)為(wèi)一款專業的航天方面的仿真工具使用的。随着STK産品的不斷發展,它從航天領域擴展到大(dà)氣層內(nèi)的航空(kōng)、陸地、海面及水(shuǐ)下行(xíng)業,并逐漸集成了通(tōng)信、導航、雷達、光電(diàn)紅外等方面的仿真內(nèi)容,深受各國軍工企業、研究所的歡迎和(hé)支持。
目前掌握的最新版本中包含了STK的機動模型、地形與城市模型、影(yǐng)像和(hé)地圖數(shù)據模型、地面設備模型、飛機和(hé)無人(rén)機模型、傳感器(qì)模型、光電(diàn)紅外探測器(qì)模型、天線模型、導彈模型、軌道(dào)彈道(dào)模型、水(shuǐ)下模型等,可(kě)用碰撞分析、交會(huì)對接操作(zuò)分析、雷達分析、系統性能分析、月球與行(xíng)星際分析、飛行(xíng)器(qì)設計(jì)與操作(zuò)、可(kě)視(shì)化的約束分析、通(tōng)信鏈路分析、氣象與大(dà)氣影(yǐng)響分析、空(kōng)間(jiān)環境、全球衛星導航系統分析等。
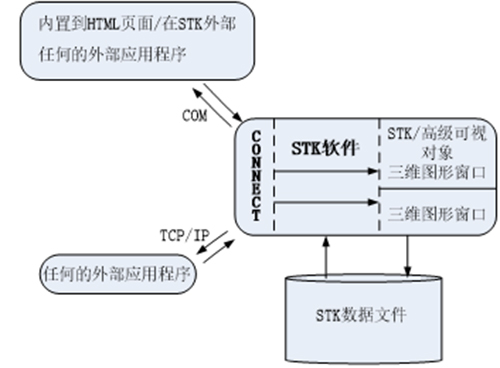
我公司緻力于STK的4DX嵌入技(jì)術(shù)的開(kāi)發。4DX是将COM組件和(hé)ActiveX組件集合在一起,形成一個(gè)STK X組件。STK X可(kě)将STK的大(dà)部分功能(如三維顯示,模型控制(zhì),數(shù)據顯示等)嵌入到Visual C++,C#, Visual Basic (6.0 and .NET), Java, Perl和(hé)Matlab 等第三方軟件。
圖2 STK與外部程序的接口關系
一、我公司提供的STK技(jì)術(shù)開(kāi)發能力
1、機動模型
脈沖和(hé)有(yǒu)限推力
以目标為(wèi)控制(zhì)參數(shù)
機動安排
姿态模型
恒定推力、多(duō)項式、等離子和(hé)外部插入的發動機模型
位置保持
機動重構
目标參數(shù)及其最優化
2、地面設備模型
城市與設施數(shù)據
方位角與仰角蒙闆
3、地形與城市模型
地球模型
城區(qū)模型
本地與基于服務器(qì)的地形
WGS84 或MSL 大(dà)地測向數(shù)據
DTED、DEM、GTOPO30、GEODAS和(hé)MOLA
高(gāo)程數(shù)據的顔色編碼
4、影(yǐng)像和(hé)地圖數(shù)據
地球影(yǐng)像
GIS 和(hé) ESRI 地圖
本地或基于服務器(qì)的
高(gāo)清影(yǐng)像
CADRG、JPEG 2000、 CIB、GeoTIFF和(hé) NITF
導航圖
5、雷達分析
單基地雷達和(hé)雙基地雷達模型
雷達布設的最優化
SAR模型
幹擾對雷達性能的影(yǐng)響
信号頻譜分析與濾波
相控陣與自定義的外部插入模型
加入RAE (雷達高(gāo)級環境)模塊,引入雷達仿真重要因素——地面雜波反射率
6、可(kě)視(shì)化的約束
時(shí)間(jiān)的
無線電(diàn)頻率的表現
物理(lǐ)的 (天體(tǐ)遮罩、地形)
幾何學 (距離、角度等)
光線
視(shì)場(chǎng)
雷達
天氣
幹涉與幹擾
用戶自定義
7、通(tōng)信鏈路分析
一次反射和(hé)多(duō)次反射鏈路
解析的和(hé)用戶自定義的功率譜密度和(hé)濾波器(qì)
相鄰信道(dào)幹擾
以光速傳播的信号時(shí)延建模
陸地傳播
幹涉與幹擾
激光通(tōng)信模型
內(nèi)置的發射機和(hé)接收機模型集合
用戶自定義的發射機、接收機、天線和(hé)相控陣模型
集成美國QualNet網絡通(tōng)信協議仿真軟件進行(xíng)聯合仿真
8、飛機和(hé)無人(rén)機模型
注重性能表現的6自由度軌迹模型
起飛、垂直起降、位置保持和(hé)降落機動
機載通(tōng)信、導航和(hé)傳感器(qì)系統模型
領空(kōng)沖突分析
姿态模型
飛行(xíng)器(qì)設計(jì)與任務規劃
太陽能帆闆功率分析
9、天線模型
30多(duō)個(gè)天線模型,包括抛物線、
高(gāo)斯、螺旋線、偶極子、ITU、合成孔徑
包括相控陣在內(nèi)的用戶自定義天線模型
多(duō)波束天線模型和(hé)累積增益天線樣式
天體(tǐ)遮罩
波束成形和(hé)自适應調零相控陣模型
極化和(hé)偏振調制(zhì)
折射對信号傳播和(hé)天線增益的影(yǐng)響
10、氣象與大(dà)氣影(yǐng)響
用于降雨損耗的ITU 和(hé) Crane 模型,以及大(dà)氣吸收損耗
對流層散射
雲霧模型
實時(shí)的天氣對通(tōng)信、雷達、視(shì)距的影(yǐng)響
11、空(kōng)間(jiān)環境
星體(tǐ)數(shù)據庫
JPL行(xíng)星數(shù)據
12、全球衛星導航系統
星曆
曆史的、實時(shí)的和(hé)預測導航精度
實時(shí)的星座表現
時(shí)鍾偏移和(hé)轉向
估計(jì)URE、 UEE、 UERE和(hé)總的信号誤差
高(gāo)保真接收機模型
幹涉和(hé)幹擾的影(yǐng)響
完整的軌道(dào)和(hé)時(shí)鍾估計(jì)
13、提供實時(shí)數(shù)據
同時(shí)顯示數(shù)千條數(shù)據的動畫(huà)
采用标準數(shù)據
向實體(tǐ)—服務器(qì)系統實時(shí)分發數(shù)據
跟蹤管理(lǐ)、存檔和(hé)回放
美軍标2525b符号
14、導彈模型
ICBM和(hé)短(duǎn)程戰術(shù)導彈設計(jì)
動力飛行(xíng)仿真和(hé)高(gāo)保真計(jì)算(suàn)模型
分段
姿态調整
攔截分析
多(duō)彈頭
雷達散射截面
防護區(qū)域分析
自定義導彈模型
15、水(shuǐ)下模型
水(shuǐ)下地形分析和(hé)可(kě)視(shì)化
為(wèi)聲學模型設計(jì)了可(kě)擴展的插入結構
反潛作(zuò)戰分析的跟蹤數(shù)據集成
深海測量數(shù)據的三維可(kě)視(shì)化